📚 CMPE1250: Introduction to Interrupts
🎯 Learning Objectives
By the end of this lesson, students will be able to:
- Describe the purpose and benefits of using interrupts in embedded systems.
- Configure and enable USART interrupts on the STM32G0B1.
- Differentiate between polling and interrupt-driven communication
1️⃣ What Are Interrupts?
An interrupt is a hardware-triggered event that causes the microcontroller to temporarily halt its current execution and jump to a predefined routine called an Interrupt Service Routine (ISR). This mechanism allows the system to respond immediately to critical events without constantly polling for changes.
Interrupts can be triggered by:
- Internal peripherals (e.g., timers, USART, ADC)
- External sources (e.g., button presses, sensor signals)
2️⃣ Why Use Interrupts?
Interrupts are essential for building responsive and efficient embedded systems. They allow the MCU to:
- Coordinate I/O tasks without wasting CPU cycles on polling.
- Respond to time-critical events like incoming serial data or sensor thresholds.
- Handle errors by reacting to fault flags or system exceptions.
- Perform routine tasks at fixed intervals (e.g., real-time clocks, periodic sampling).
These capabilities are especially important in real-time systems and multitasking environments such as RTOS-based applications.
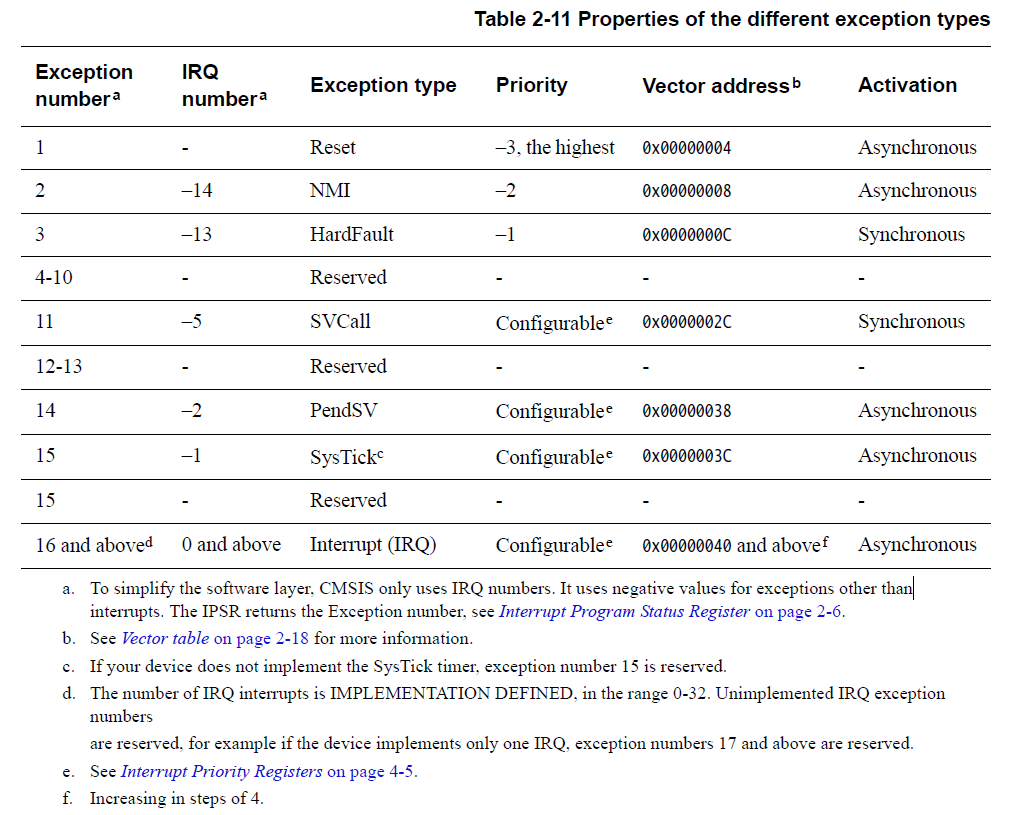
3️⃣ Interrupt Masking and Prioritization
-
Masking: Not all interrupts are needed at all times. Maskable interrupts can be enabled or disabled via control registers. However, non-maskable interrupts (NMIs) are always active and reserved for critical system events.
-
Priority: When multiple interrupts occur, the one with the highest priority is serviced first. This ensures deterministic behavior in complex systems.
4️⃣ Process to Enable and Use an Interrupt
-
Enable the Interrupt in the peripheral control register. (Ex.
USART2->CR1) -
Call CMSIS function
NVIC_EnableIRQ(PerX_IRQn)using the correspondingPerX_IRQn. -
Code the ISR using the corresponding
PerX_IRQHandler -
Intert the code in the ISR. Remember to:
-
Clear the flag in the status register
-
Clear the pending IRQ using the CMSIS function call
NVIC_ClearPendingIRQ(PerX_IRQn) -
Keep the code inside the ISR as brief as possible
-
5️⃣ Locating the Interrupt Vector Table and IRQn Definitions
To correctly implement an Interrupt Service Routine (ISR) and enable it using CMSIS calls, you need to understand two key components:
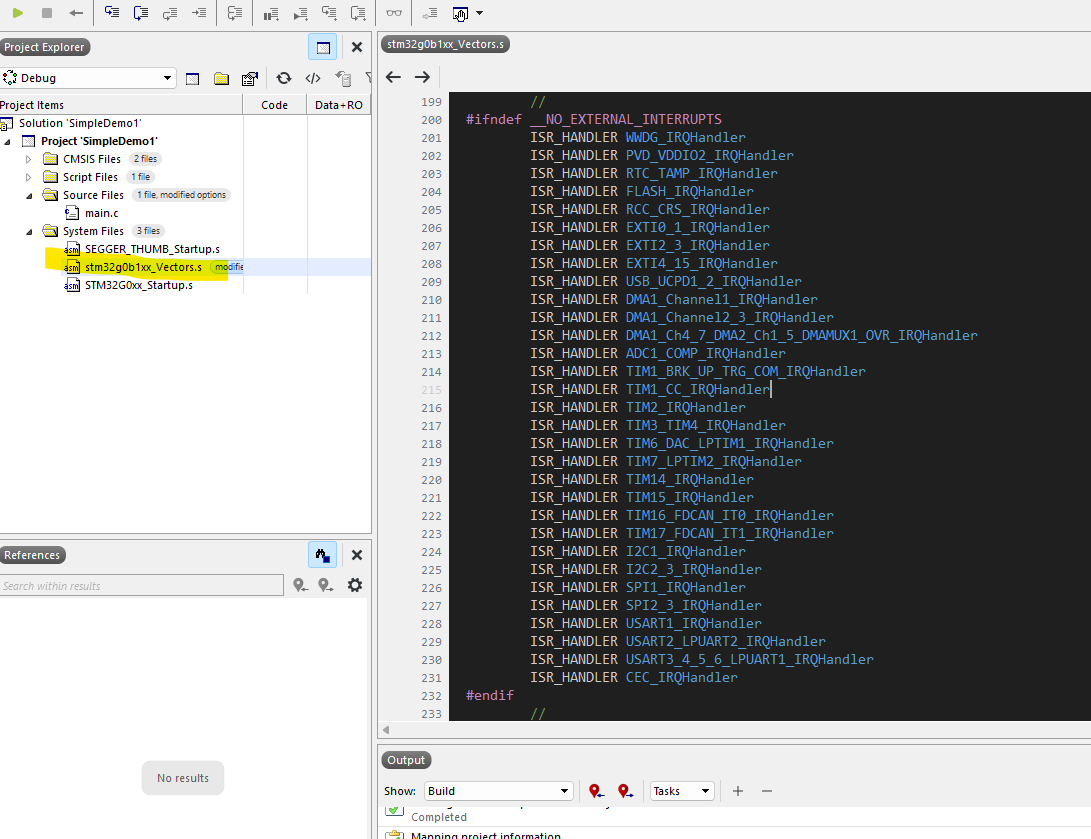
1. 🧩Interrupt Vector Table
-
The interrupt vector table maps each interrupt source to its corresponding handler function.
-
On STM32 devices, this table is defined in the startup file (usually
stm32g0b1xx_Vectors.sor similar) and includes entries like:
DCD USART2_IRQHandler ; USART2 global interrupt
Where to find it
-
File:
stm32g0b1xx_Vectors.s -
Location: Typically in the
System Filesof your SEGGER Embedded Studio project. -
Purpose: This file defines the default handlers and links them to the actual ISR functions you write in main.c or another source file
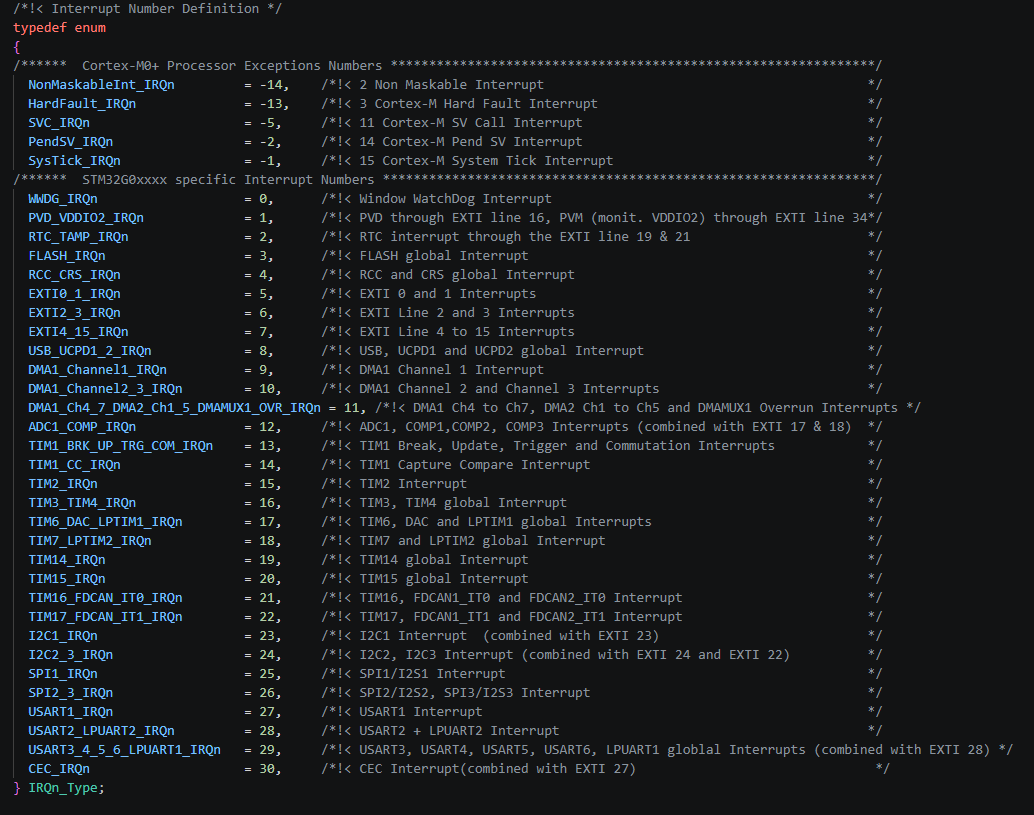
2. 🧩IRQn Definitions for CMSIS
To enable or configure interrupts using CMSIS functions like NVIC_EnableIRQ(), you need the correct IRQn enumeration.
-
✅ Example:
NVIC_EnableIRQ(USART2_IRQn);
Where to find it
Here, is an enum defined in the device header file.
-
File:
stm32g0b1xx.h. One easy way to access it from Segger ES is, if included in main.c, write click on it and select: Go to definition. -
Location: In the project folder Under STM32G0xx/Device/Include/
-
Section: Look for the
IRQn_Typeenum, which includes entries like:USART2_IRQn = 28, /*!< USART2 global interrupt */
-
This enum is used by CMSIS functions to identify and manage interrupts.
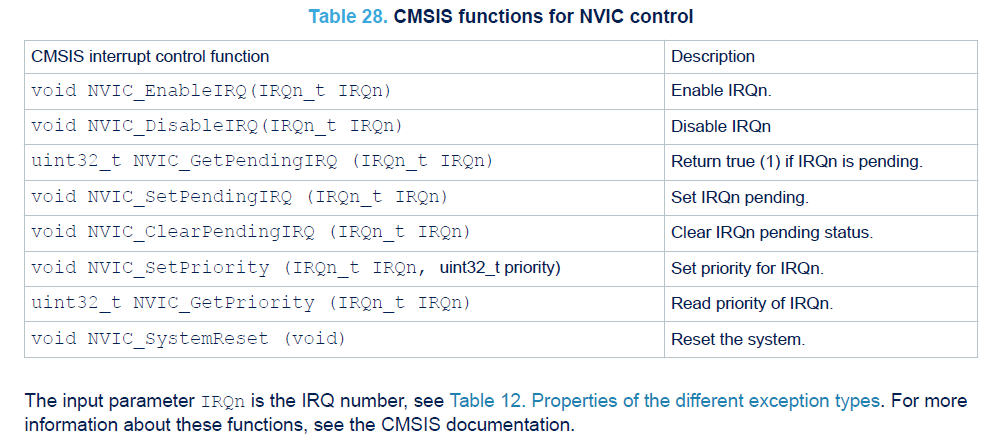
6️⃣ CMSIS NVIC (Nested Vectored Interrupt Controller) Intrinsic Functions
-
Software uses the
CPSIEiandCPSIDiinstructions (asm) to enable and disable interrupts. -
The CMSIS provides the following intrinsic functions for these instructions:
void __disable_irq(void) // Disable interrupts
void __enable_irq(void) // Enable interrupts, by default enabled
In addition, the CMSIS provides a number of functions for NVIC control, including:
-
More information: